Sponsored By
Latest News
A thief looks down from the rooftop in a fantasy city.
DesignWarren Spector says the next logical step for immersive sims is multiplayer
Warren Spector says the next logical step for immersive sims is multiplayer
The Deus Ex director is still taking inspiration from tabletop with Otherside Entertainment's Thick as Thieves.


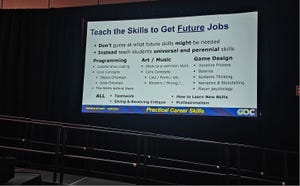
Tips, Talks, and Highlights from GDC 2024
More from GDC


Get daily news, dev blogs, and stories from Game Developer straight to your inbox
Subscribe to Game Developer Newsletters to stay caught up with the latest news, design insights, marketing tips, and more

















Game Developer Essentials
More resources for devs

Read Dev Blogs on Game Developer
See all


From Our Sponsors
LEARN MORE


Sponsored Content
Mar 8, 2024
.png?width=300&auto=webp&quality=80&disable=upscale)

