Sponsored By
Screenshot of an archive within the Video Game History Foundation.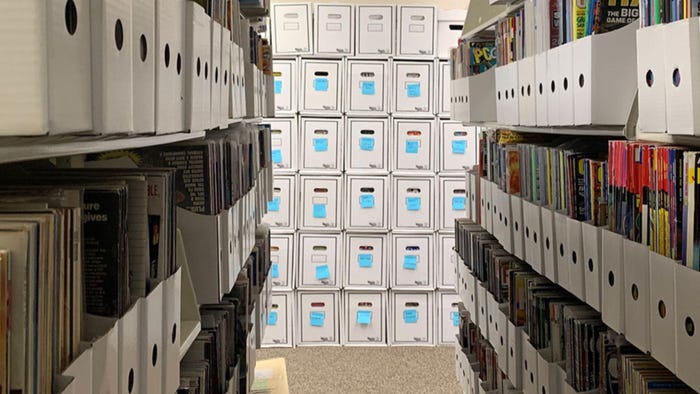
BusinessESA says members won’t support any plan for libraries to preserve games onlineESA says members won’t support any plan for libraries to preserve games online
The proposed plans for archiving older games at libraries don't strike a chord with the ESA.





































Latest News
Trending

Featured Blogs



Daily news, dev blogs, and stories from Game Developer straight to your inbox